BibTeX
# arxiv version
@misc{li2024generalizingconsistencypolicyvisual,
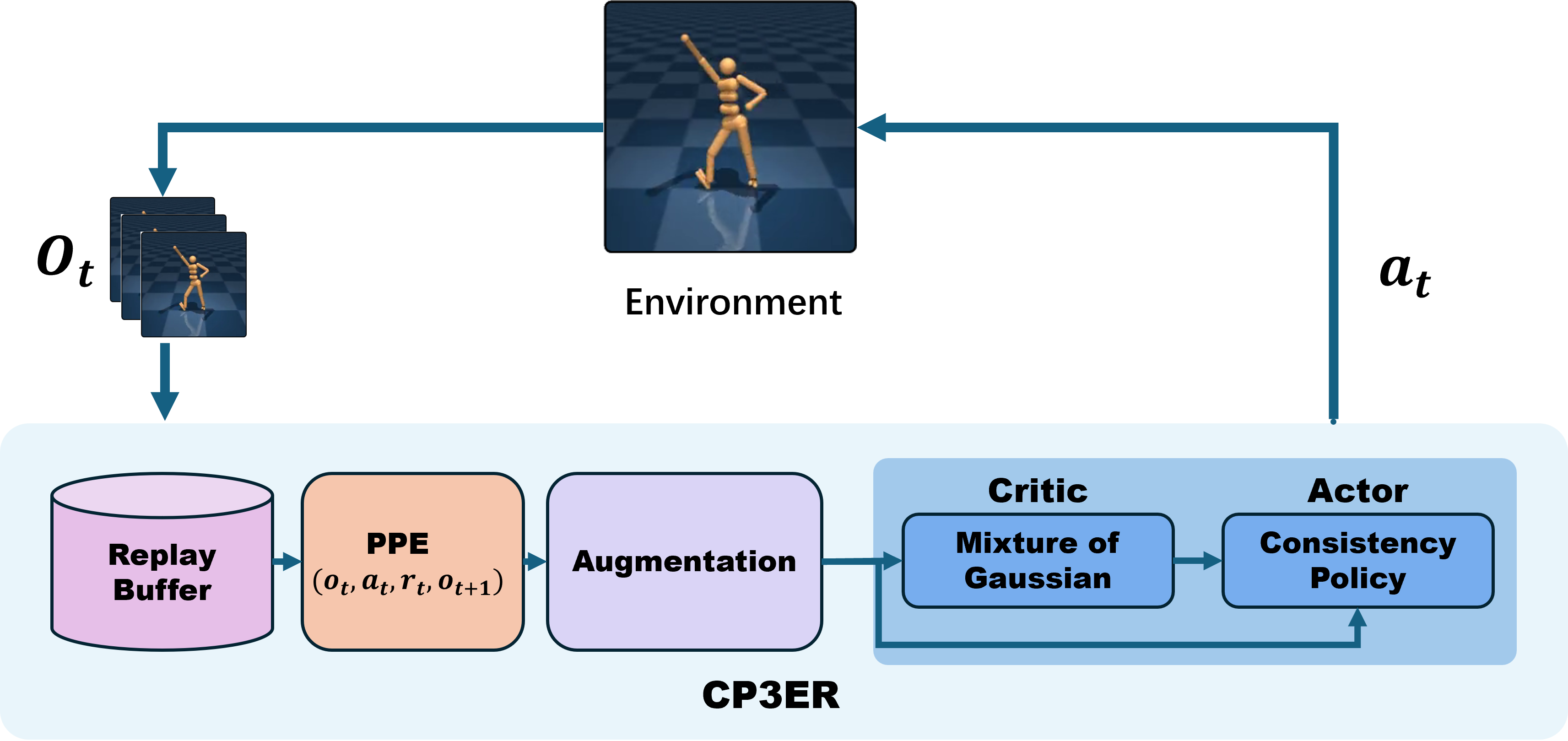
title={Generalizing Consistency Policy to Visual RL with Prioritized Proximal Experience Regularization},
author={Haoran Li and Zhennan Jiang and Yuhui Chen and Dongbin Zhao},
year={2024},
eprint={2410.00051},
archivePrefix={arXiv},
primaryClass={cs.LG},
url={https://arxiv.org/abs/2410.00051},
}
# NeurIPS version
@inproceedings{
li2024generalizing,
title={Generalizing Consistency Policy to Visual {RL} with Prioritized Proximal Experience Regularization},
author={Haoran Li and Zhennan Jiang and YUHUI CHEN and Dongbin Zhao},
booktitle={The Thirty-eighth Annual Conference on Neural Information Processing Systems},
year={2024},
url={https://openreview.net/forum?id=MOFwt8OeXr}
}